My proof-of-concept works pretty stable - please check the status screen:
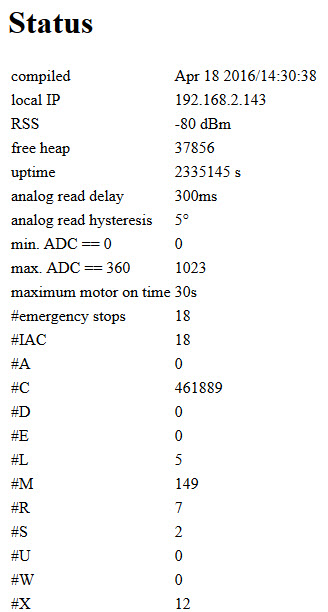
It was running now for about 2.335.418s = 648h = 27d without any problem. The device answered nearly 1/2 million of position requests.
Due to a missing hardware control interface, the movement is very restricted.
The seleced virtual COMP port on my laptop works also stable - the connection surives Hibernation- and Sleep-Mode.